

Los comportamientos colectivos permiten a los animales como las hormigas lograr notables hazañas a nivel de colonia a través de las acciones distribuidas de millones de agentes independientes. Estos comportamientos colectivos están inspirando a los ingenieros a construir robots móviles simples que aprovechen el poder demostrado del enjambre, realizando tareas colectivas como transportar objetos grandes o construir de forma autónoma estructuras a escala humana.
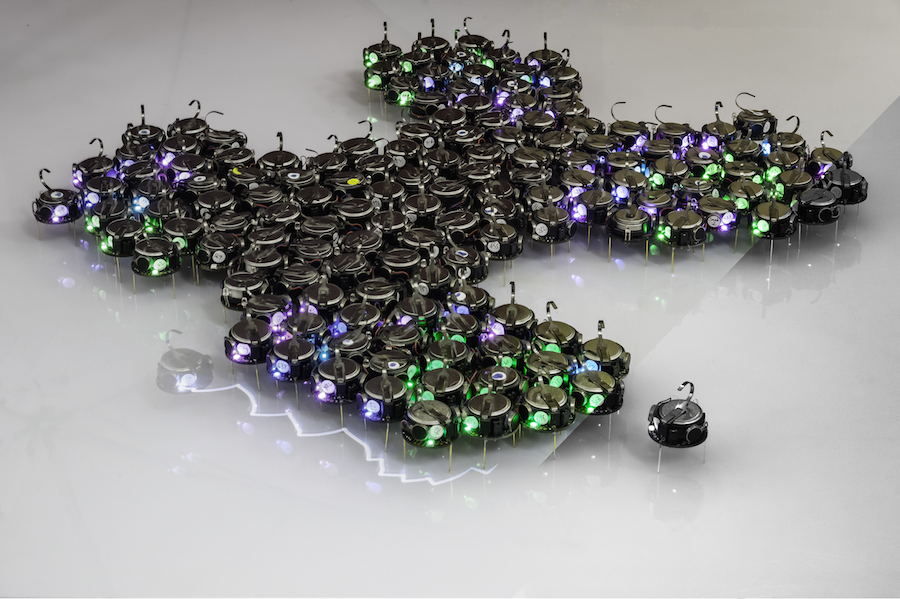
En la actualidad, la mayoría de los robots están diseñados para trabajar solos, no como parte de un equipo. Los investigadores de distintos institutos están desarrollando sistemas robóticos y enfoques algorítmicos para hacer enjambres artificiales de robots que colaboren hacia un objetivo común. En una de las aplicaciones autorizadas de esta tecnología, se puede programar un colectivo de 1024 «Kilobots» (que significa «mil robots») para que muestren comportamientos complejos de enjambre, como la búsqueda de alimento y la sincronización inspirada en las luciérnagas, mientras que un usuario puede interactuar con el enjambre en su conjunto (programar los robots, encenderlos y apagarlos, etc.), sin importar cuántos robots haya. También se están desarrollando robots de enjambre submarino inspirados en los Kilobot que utilizan un novedoso sistema de visión para coordinar los movimientos como los bancos de peces. La tecnología Kilobot ha sido licenciada a K-Team Corporation para aplicaciones de investigación y educativas como plataforma para algoritmos de enjambres colectivos en hardware en lugar de simplemente simulaciones por computadora.
Más allá de esto, un «sistema operativo» de colmena podría permitir a un usuario programar colonias de robots para realizar tareas complejas en entornos naturales como tierra, aire y mar. Se podría ordenar a los microrobots voladores que polinizaran un campo o, inspirándose en las termitas que construyen montículos, se podría programar un equipo de construcción de robots autónomos para construir estructuras 3D y superficies transitables, para apilar sacos de arena a lo largo de las costas vulnerables antes de un huracán, o para colocar barreras alrededor de derrames químicos tóxicos. Para alcanzar estos objetivos, los investigadores han desarrollado una tecnología de sensores de vanguardia, microactuadores y controladores robustos que permiten a los robots adaptarse rápidamente a las condiciones cambiantes.
Fuente: Wyss Institute
Te recomendamos: ¿Qué es el programa ARTEMIS?